Look Around and Learn: Self-Training Object Detection by Exploration
{kind=link}
Abstract
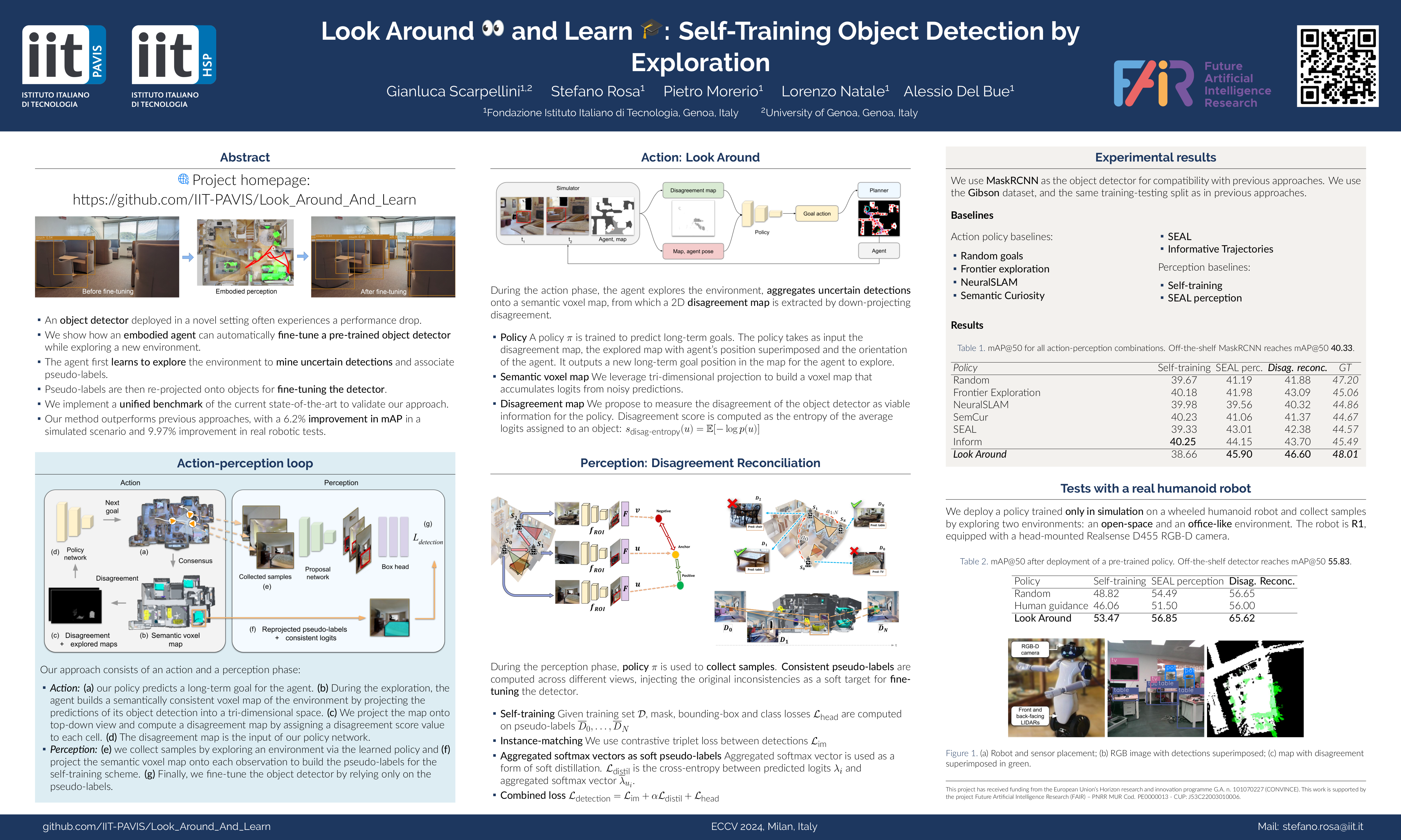
When an object detector is deployed in a novel setting it often experiences a drop in performance. This paper studies how an embodied agent can automatically fine-tune a pre-existing object detector while exploring and acquiring images in a new environment without relying on human intervention, i.e., a fully self-supervised approach. In our setting, an agent initially learns to explore the environment using a pre-trained off-the-shelf detector to locate objects and associate pseudo-labels. By assuming that pseudo-labels for the same object must be consistent across different views, we learn the exploration policy "Look Around" to mine hard samples, and we devise a novel mechanism called "Disagreement Reconciliation" for producing refined pseudo-labels from the consensus among observations. We implement a unified benchmark of the current state-of-the-art and compare our approach with pre-existing exploration policies and perception mechanisms. Our method is shown to outperform existing approaches, improving the object detector by 6.2% in a simulated scenario, a 3.59% advancement over other state-of-the-art methods, and by 9.97% in the real robotic test without relying on ground-truth. Code for the proposed approach and implemented baselines together with the dataset will be made available upon paper acceptance.