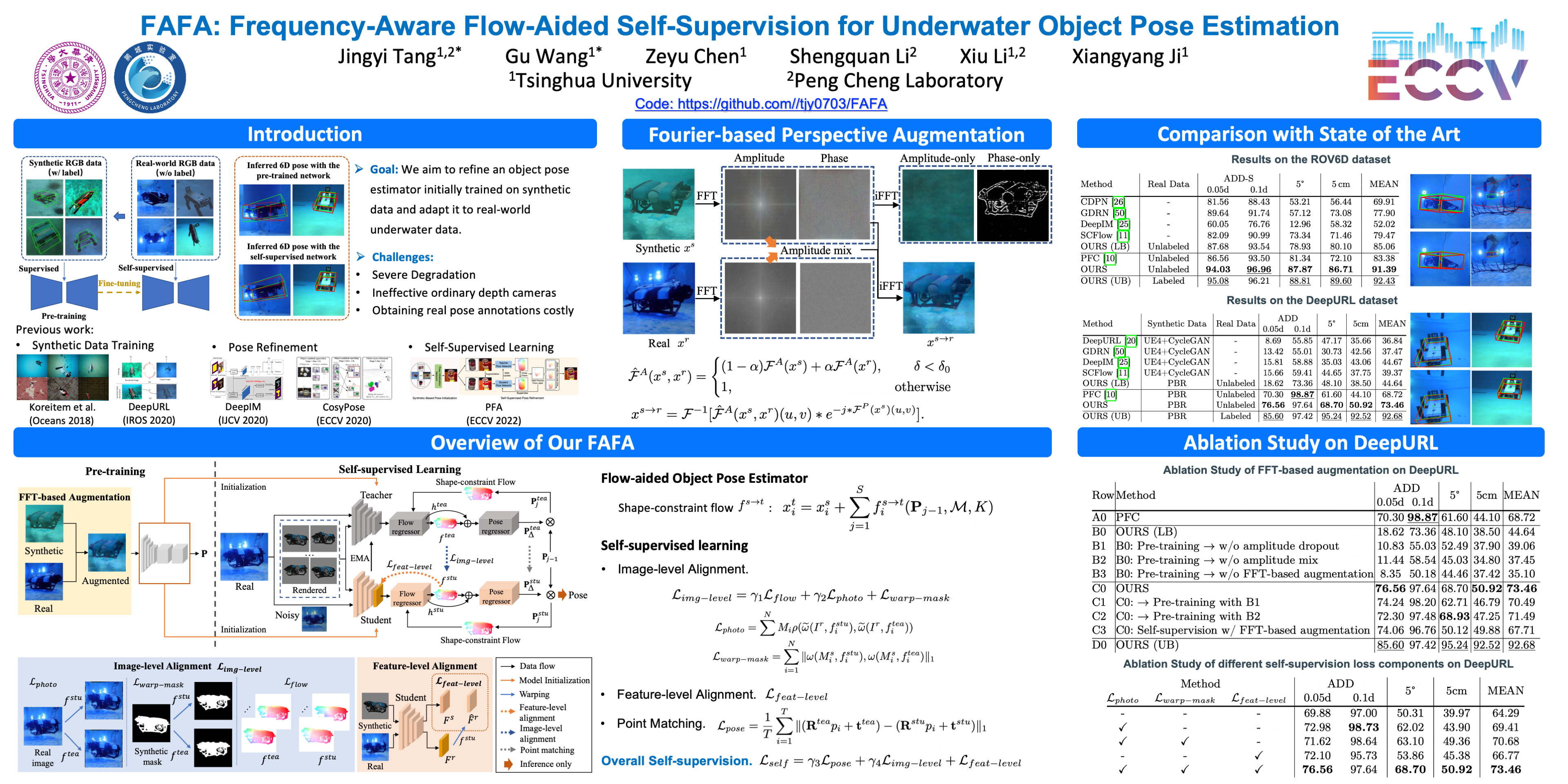
FAFA: Frequency-Aware Flow-Aided Self-Supervision for Underwater Object Pose Estimation
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
Although methods for estimating the pose of objects in indoor scenes have achieved great success, the pose estimation of underwater objects remains challenging due to difficulties brought by the complex underwater environment, such as degraded illumination, blurring, and the substantial cost of obtaining real annotations. To this end, we introduce FAFA, a Frequency-Aware Flow-Aided self-supervised framework for 6D pose estimation of unmanned underwater vehicles (UUVs). Essentially, we first train a frequency-aware flow-based pose estimator on synthetic data, where an FFT-based augmentation approach is proposed to facilitate the network in capturing domain-invariant features and target domain styles from a frequency perspective. Further, we perform self-supervised training by enforcing flow-aided multi-level consistencies to adapt it to the real-world underwater environment. Our framework relies solely on the 3D model and RGB images, alleviating the need for any real pose annotations or other-modality data like depths. We evaluate the effectiveness of FAFA on common underwater object pose benchmarks and showcase significant performance improvements compared to state-of-the-art methods. Our code will be made publicly available.