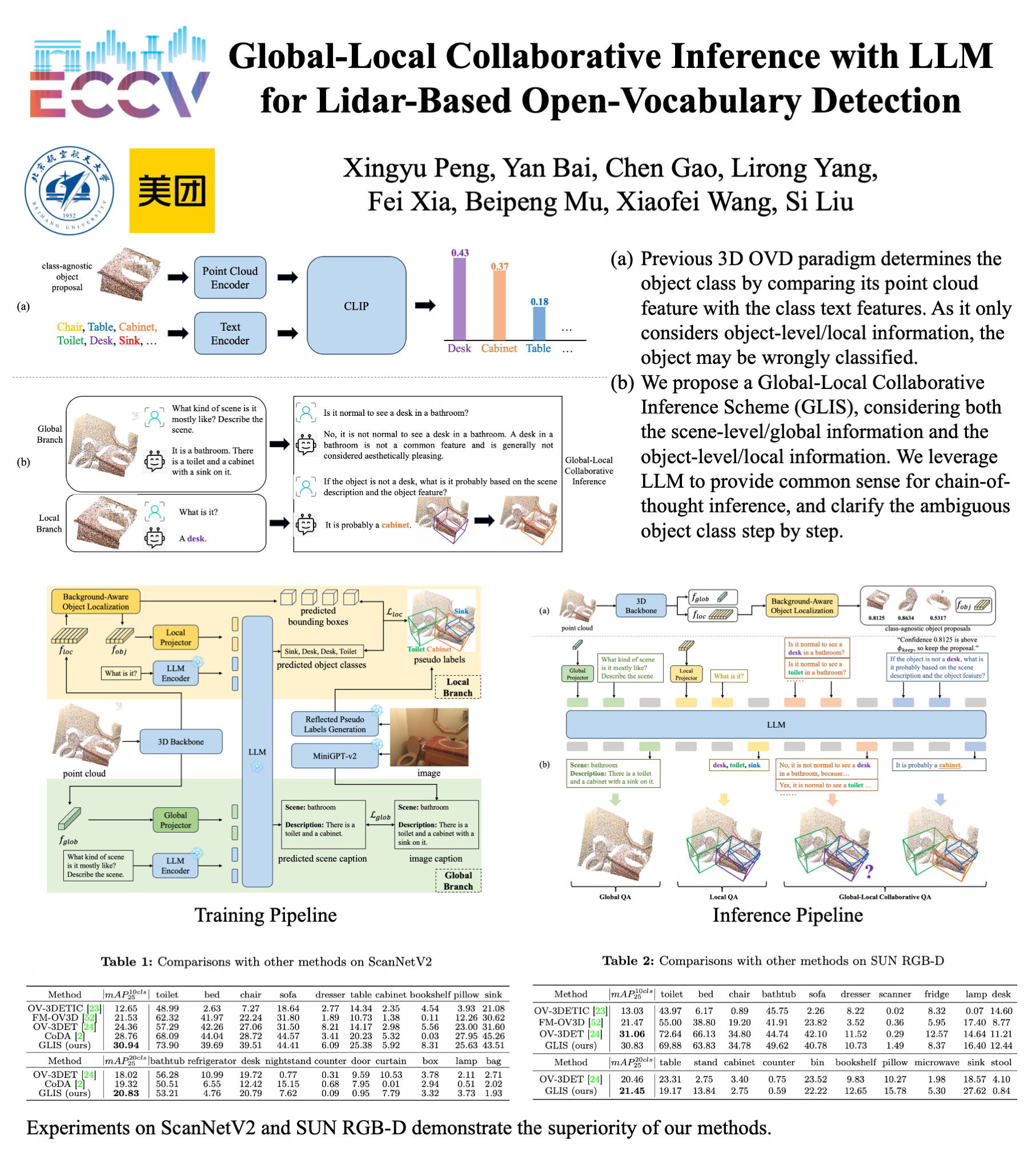
Global-Local Collaborative Inference with LLM for Lidar-Based Open-Vocabulary Detection
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
Open-Vocabulary Detection (OVD) is the task of detecting all interesting objects in a given scene without predefined object classes. Extensive work has been done to deal with the OVD for 2D RGB images, but the exploration of 3D OVD is still limited. Intuitively, lidar point clouds provide 3D information, both object level and scene level, to generate trustful detection results. However, previous lidar-based OVD methods only focus on the usage of object-level features, ignoring the essence of scene-level information. In this paper, we propose a Global-Local Collaborative Scheme (GLIS) for the lidar-based OVD task, which contains a local branch to generate object-level detection result and a global branch to obtain scene-level global feature. With the global-local information, a Large Language Model (LLM) is applied for chain-of-thought inference, and the detection result can be refined accordingly. We further propose Reflected Pseudo Labels Generation (RPLG) to generate high-quality pseudo labels for supervision and Background-Aware Object Localization (BAOL) to select precise object proposals. Extensive experiments on ScanNetV2 and SUN RGB-D demonstrate the superiority of our methods.