EINet: Point Cloud Completion via Extrapolation and Interpolation
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
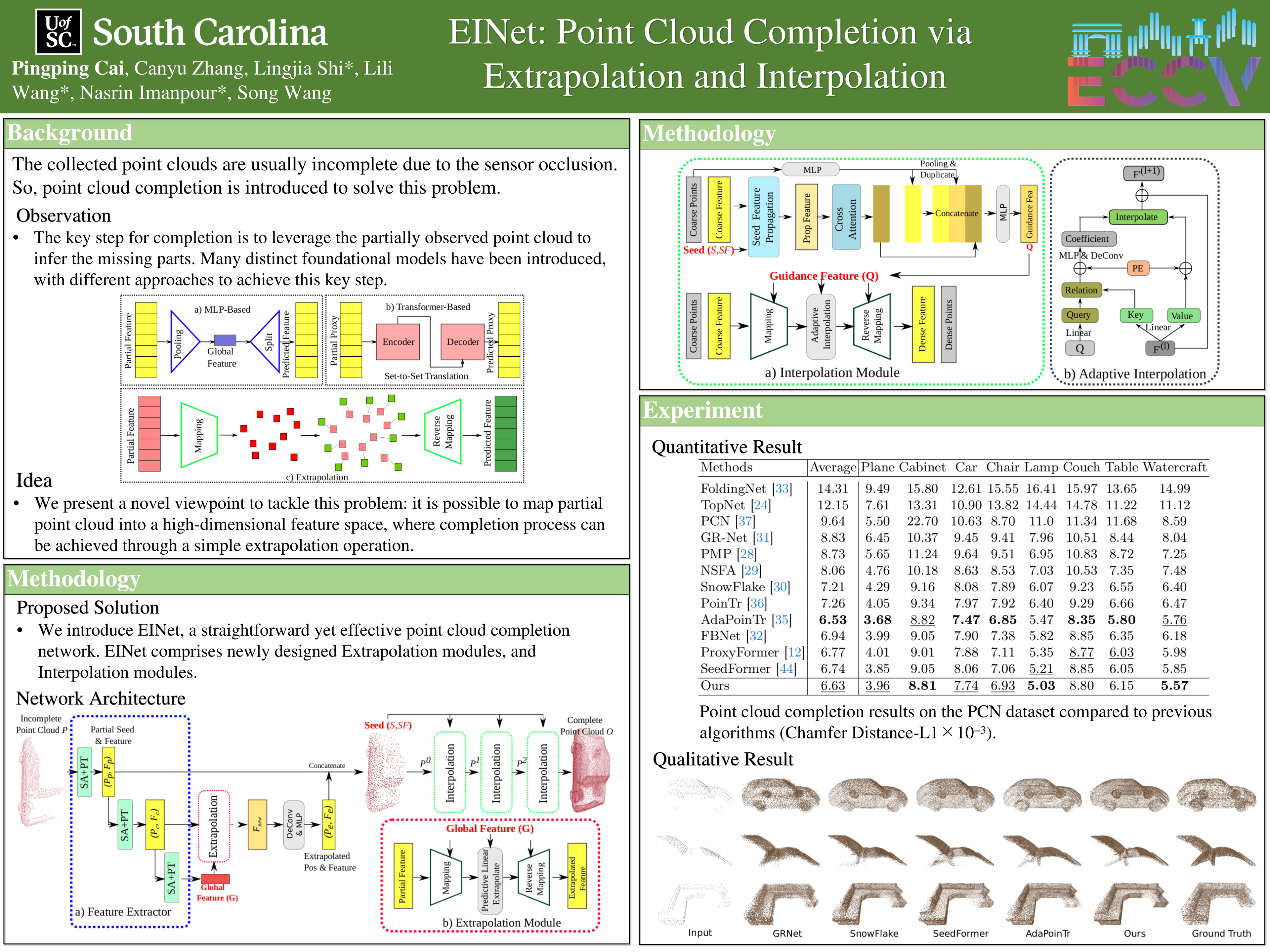
Scanned point clouds are often sparse and incomplete due to the limited field of view of sensing devices, significantly impeding the performance of downstream applications. Therefore, the task of point cloud completion is introduced to obtain a dense and complete point cloud from the incomplete input. The fundamental challenges in tackling this task involve accurately inferring the missing shapes and upsampling them to higher densities. In this paper, we propose a novel approach to address this task, which formulates the completion task as a dual problem: a feature-wise extrapolation problem, where the shape features of the partial point cloud are extrapolated to outlier regions for the recovery of missing portions, and a feature-wise interpolation problem to achieve point cloud upsampling. Based on these, we propose the EINet, a new point cloud completion paradigm with a novel Extrapolation module that can predict the missing shapes for the partial point cloud and a newly designed Interpolation module to upsample the point cloud. Extensive evaluation results demonstrate that EINet achieves compelling performance compared to previous state-of-the-art methods.