FoundPose: Unseen Object Pose Estimation with Foundation Features
{kind=link}
Abstract
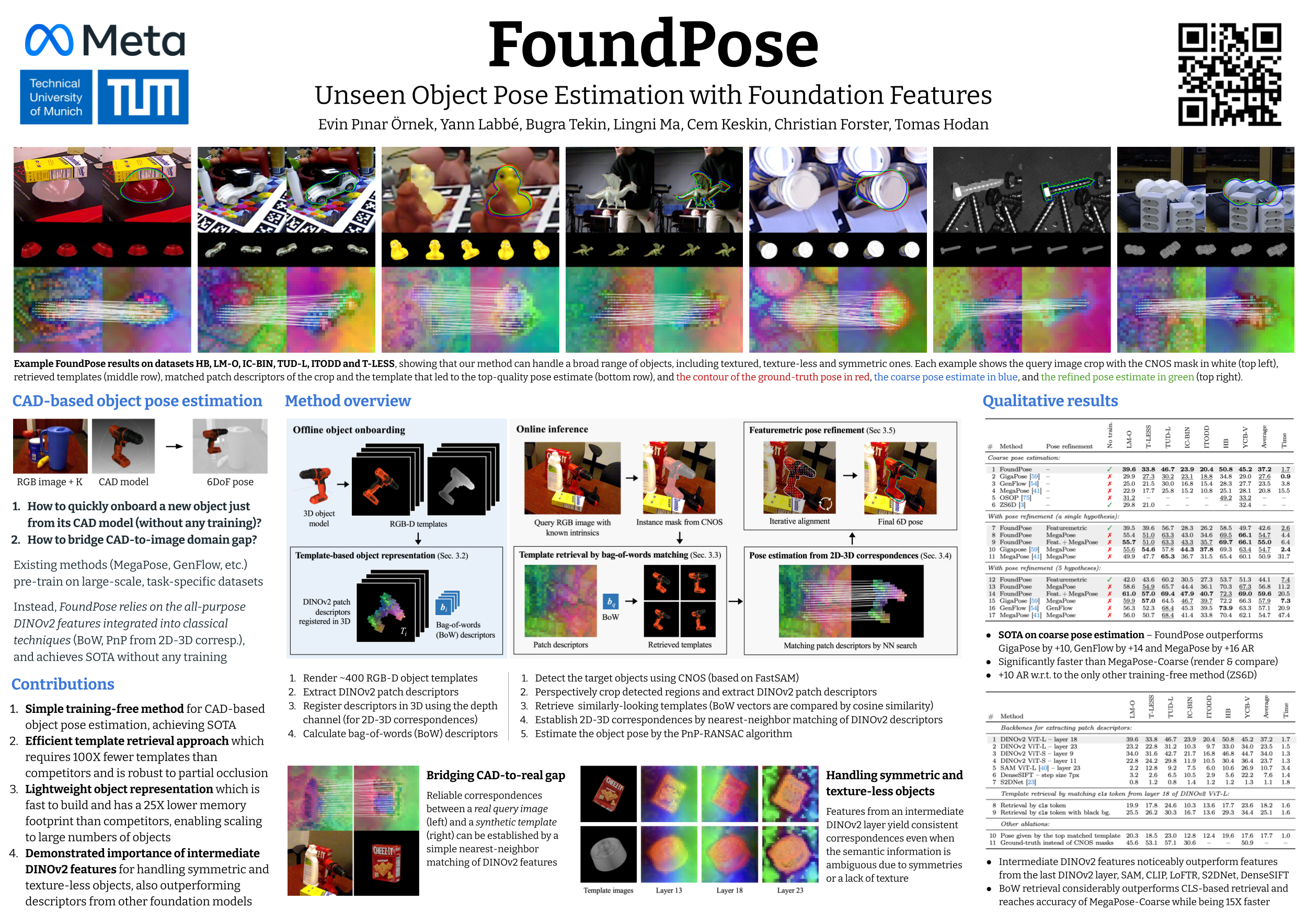
We propose FoundPose, a model-based method for 6D pose estimation of unseen objects from a single RGB image. The method can quickly onboard new objects using their 3D models, without requiring any object- nor task-specific training. In contrast, existing methods typically pre-train on large-scale, task-specific datasets in order to generalize to new objects and to bridge the image-to-model domain gap. We demonstrate that such generalization capabilities can be observed in a recent vision foundation model trained in a self-supervised manner. Specifically, our method estimates the object pose from image-to-model 2D-3D correspondences, which are established by matching patch descriptors from the recent DINOv2 model between the image and pre-rendered object templates. We find that reliable correspondences can be established by kNN matching of patch descriptors from an intermediate DINOv2 layer. Such descriptors carry stronger positional information than descriptors from the last layer, and we show their importance when semantic information is ambiguous due to object symmetries or a lack of texture. To avoid establishing correspondences against all object templates, we develop an efficient template retrieval approach that integrates the patch descriptors into the bag-of-words representation, and can promptly propose a handful of similarly looking templates. Additionally, we apply featuremetric alignment to compensate for discrepancies in the 2D-3D correspondences caused by coarse patch sampling. The resulting method noticeably outperforms existing RGB methods for refinement-free pose estimation on the standard BOP benchmark with seven diverse datasets, and can be seamlessly combined with an existing render-and-compare refinement method to achieve RGB-only state-of-the-art results. Source code will be available upon acceptance.