Align before Collaborate: Mitigating Feature Misalignment for Robust Multi-Agent Perception
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
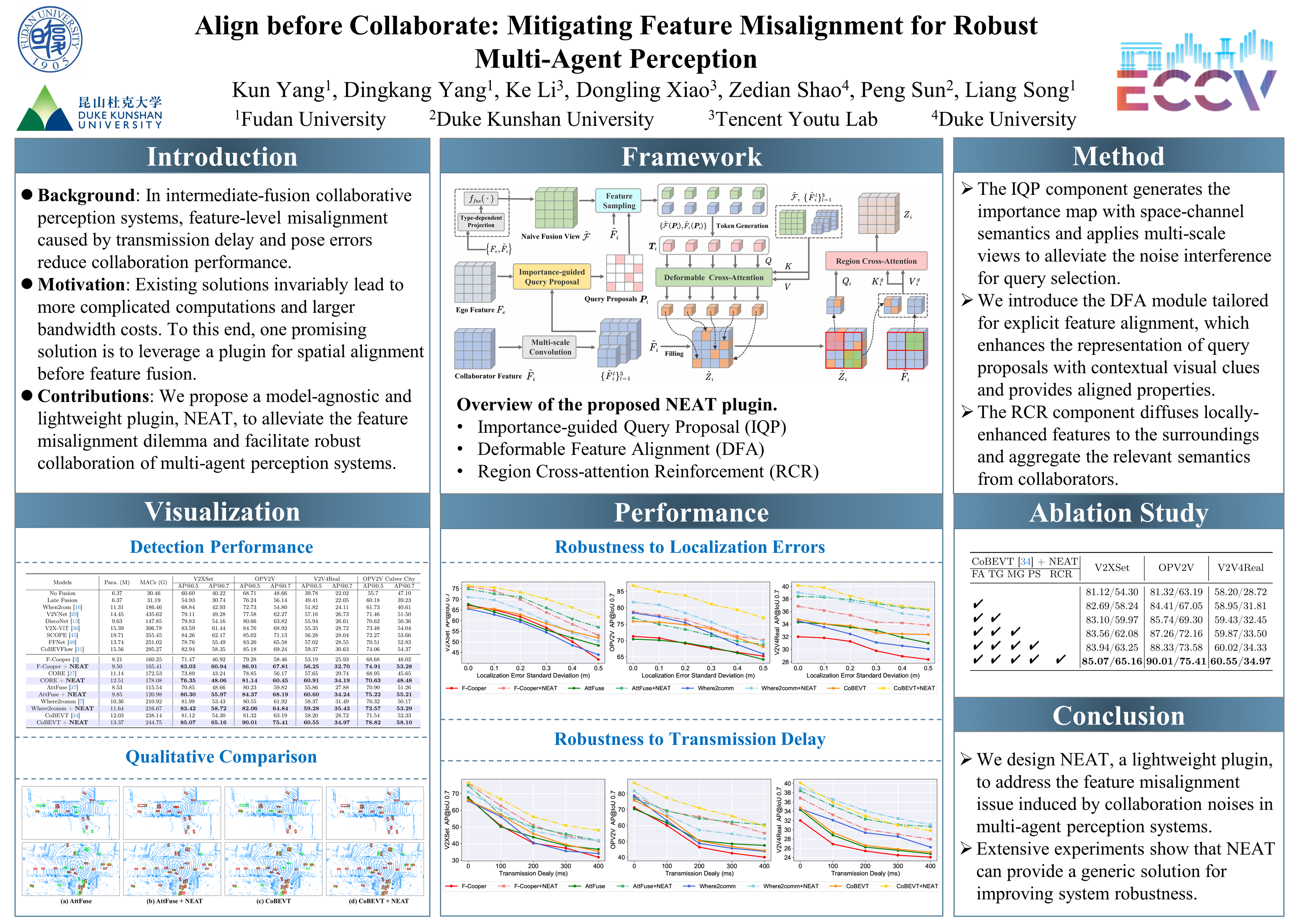
Collaborative perception has received widespread attention recently since it enhances the perception ability of autonomous vehicles via inter-agent information sharing. However, the performance of existing systems is hindered by the unavoidable collaboration noises, which induce feature-level spatial misalignment over the collaborator-shared information. In this paper, we propose a model-agnostic and lightweight plugin to mitigate the feature-level misalignment issue, called dynamic feature alignment (NEAT). The merits of the NEAT plugin are threefold. First, we introduce an importance-guided query proposal to predict potential foreground regions with space-channel semantics and exclude environmental redundancies. On this basis, a deformable feature alignment is presented to explicitly align the collaborator-shared features through query-aware spatial associations, aggregating multi-grained visual clues with corrective mismatch properties. Ultimately, we perform a region cross-attention reinforcement to facilitate aligned representation diffusion and achieve global feature semantic enhancement. NEAT can be readily inserted into existing collaborative perception procedures and significantly improves the robustness of vanilla baselines against pose errors and transmission delay. Extensive experiments on four collaborative 3D object detection datasets under noisy settings confirm that NEAT provides consistent gains for most methods with distinct structures.