Modelling Competitive Behaviors in Autonomous Driving Under Generative World Model
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
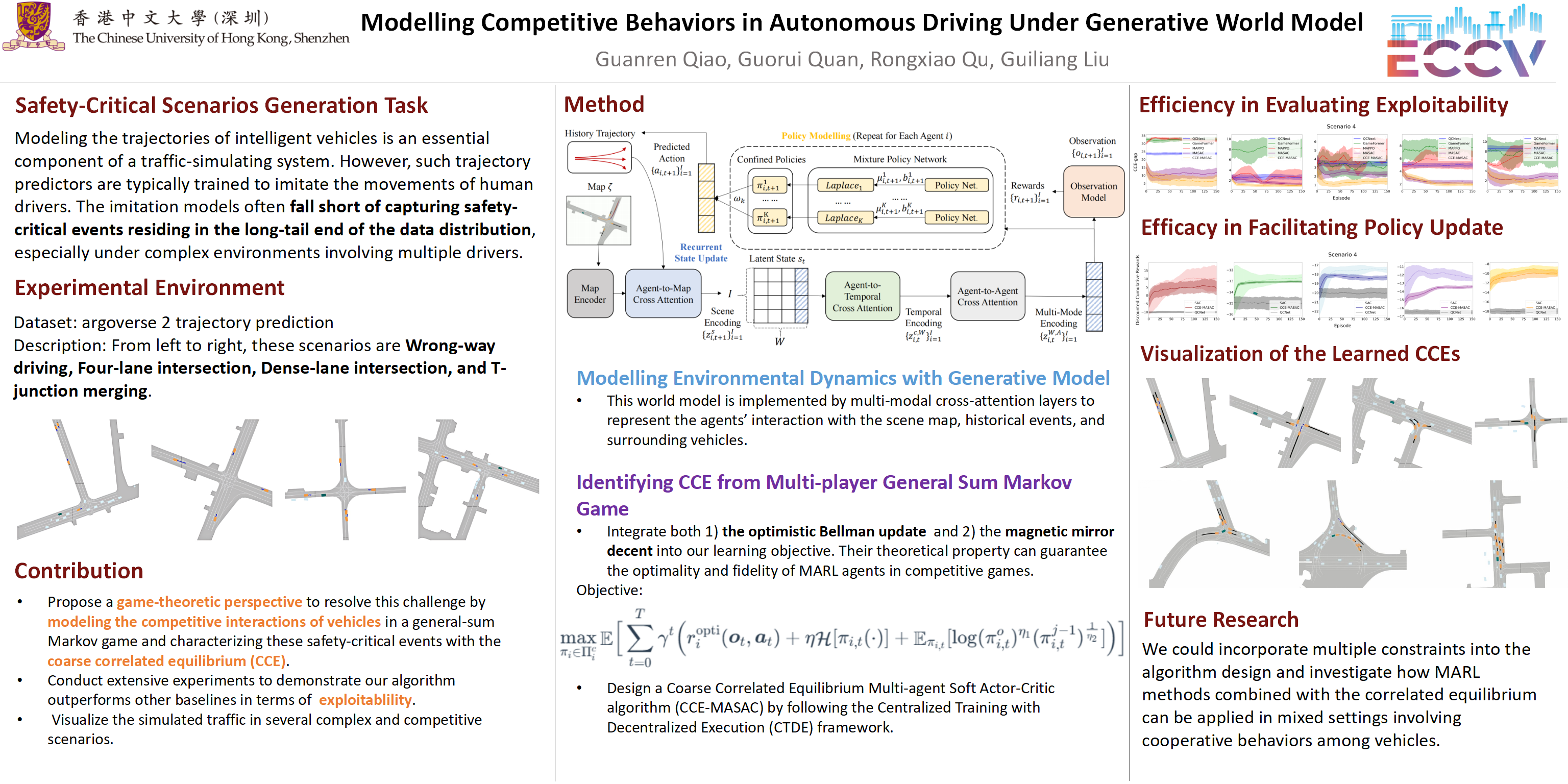
Modeling the trajectories of intelligent vehicles is an essential component of a traffic-simulating system. However, such trajectory predictors are typically trained to imitate the movements of human drivers. The imitation models often fall short of capturing safety-critical events residing in the long-tail end of the data distribution, especially under complex environments involving multiple drivers. In this paper, we propose a game-theoretic perspective to resolve this challenge by modeling the competitive interactions of vehicles in a general-sum Markov game and characterizing these safety-critical events with the correlated equilibrium. To achieve this goal, we pretrain a generative world model to predict the environmental dynamics of self-driving scenarios. Based on this world model, we probe the action predictor for identifying the Coarse Correlated Equilibrium (CCE) by incorporating both optimistic Bellman update and magnetic mirror descent into the objective function of the Multi-Agent Reinforcement Learning (MARL) algorithm. We conduct extensive experiments to demonstrate our algorithm outperforms other baselines in terms of efficiently closing the CCE-gap and generating meaningful trajectories under competitive autonomous driving environments.