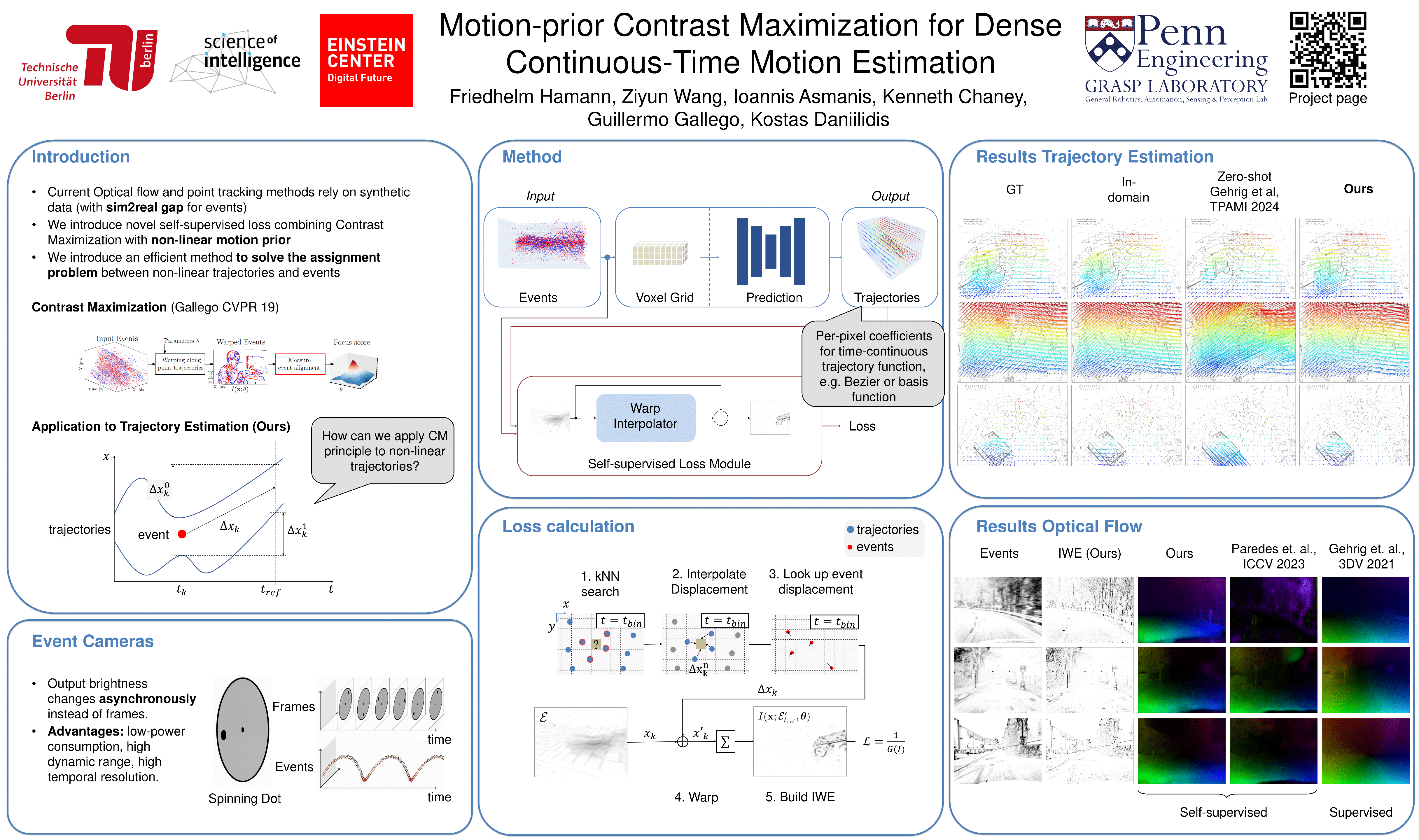
Motion-prior Contrast Maximization for Dense Continuous-Time Motion Estimation
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
Current optical flow and point-tracking methods rely heavily on synthetic datasets. Event cameras are novel vision sensors with advantages in challenging visual conditions, but state-of-the-art frame-based methods cannot be easily adapted to event data due to the limitations of current event simulators. We introduce a novel self-supervised loss combining the Contrast Maximization framework with a non-linear motion prior in the form of pixel-level trajectories and propose an efficient solution to solve the high-dimensional assignment problem between non-linear trajectories and events. Their effectiveness is demonstrated in two scenarios: In dense continuous-time motion estimation, our method improves the zero-shot performance of a synthetically trained model on the real-world dataset EVIMO2 by 29%. In optical flow estimation, our method elevates a simple UNet to achieve state-of-the-art performance among self-supervised methods on the DSEC optical flow benchmark.