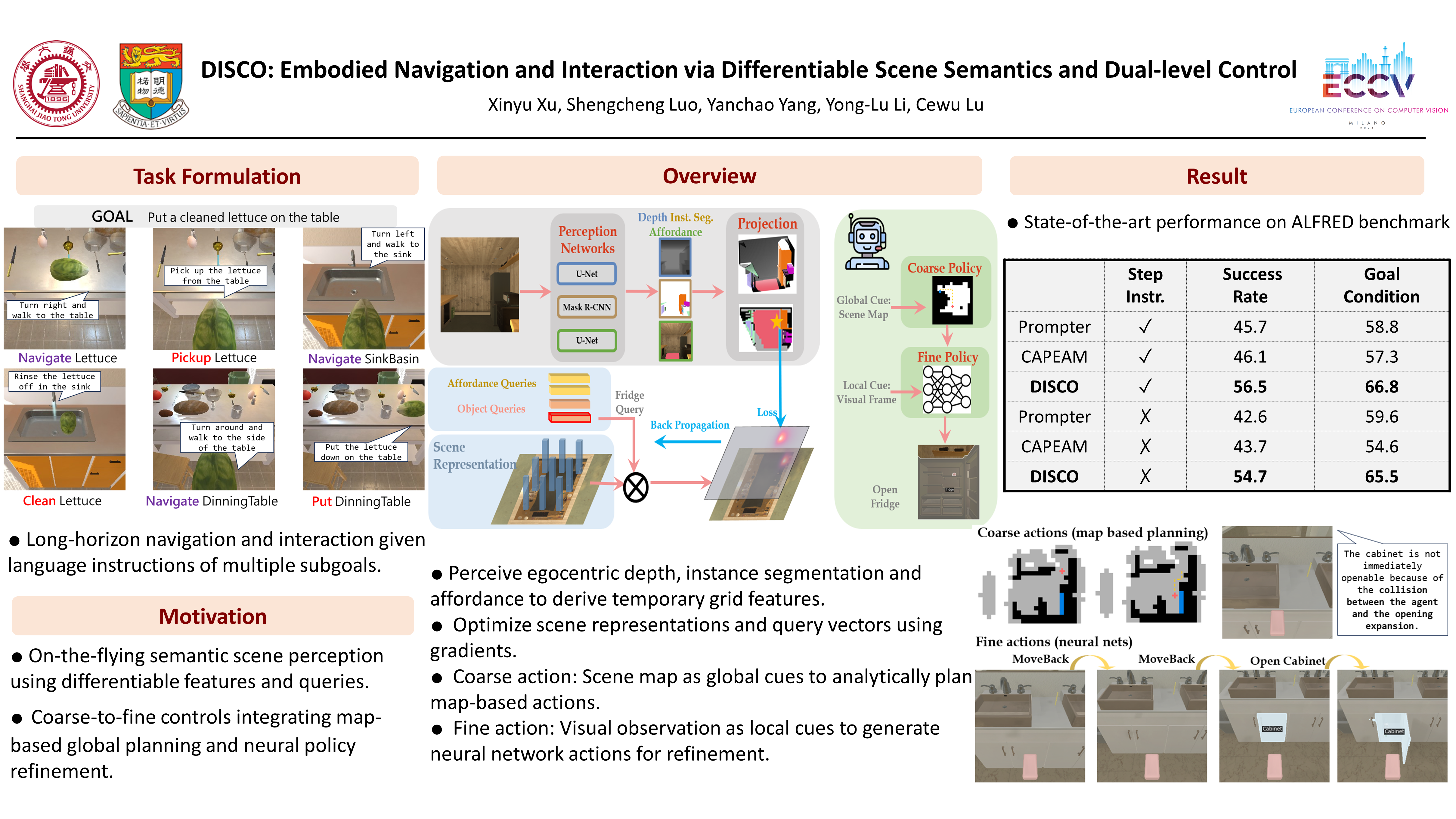
DISCO: Embodied Navigation and Interaction via Differentiable Scene Semantics and Dual-level Control
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
Building a general-purpose intelligent home-assistant agent skilled in diverse tasks by human commands is a long-term blueprint of embodied AI research, which poses requirements on task planning, environment modeling, and object interaction. In this work, we study primitive mobile manipulations for embodied agents, i.e. how to navigate and interact based on an instructed verb-noun pair. We propose DISCO, which features non-trivial advancements in contextualized scene modeling and efficient controls. In particular, DISCO incorporates differentiable scene representations of rich semantics in object and affordance, which is dynamically explored on the fly and facilitates navigation planning. Besides, we propose dual-level coarse-to-fine action controls leveraging both global and local cues to accomplish mobile manipulation tasks efficiently. DISCO easily integrates into embodied tasks such as embodied instruction following. To validate our approach, we take the ALFRED benchmark, of large-scale long-horizon vision-language navigation and interaction tasks, as a test bed. In extensive experiments, we make comprehensive evaluations and demonstrate that DISCO outperforms the art by a sizable +8.6\% success rate margin in unseen scenes, even without step-by-step instructions. Our code and model will be made publicly available.