Localization and Expansion: A Decoupled Framework for Point Cloud Few-shot Semantic Segmentation
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
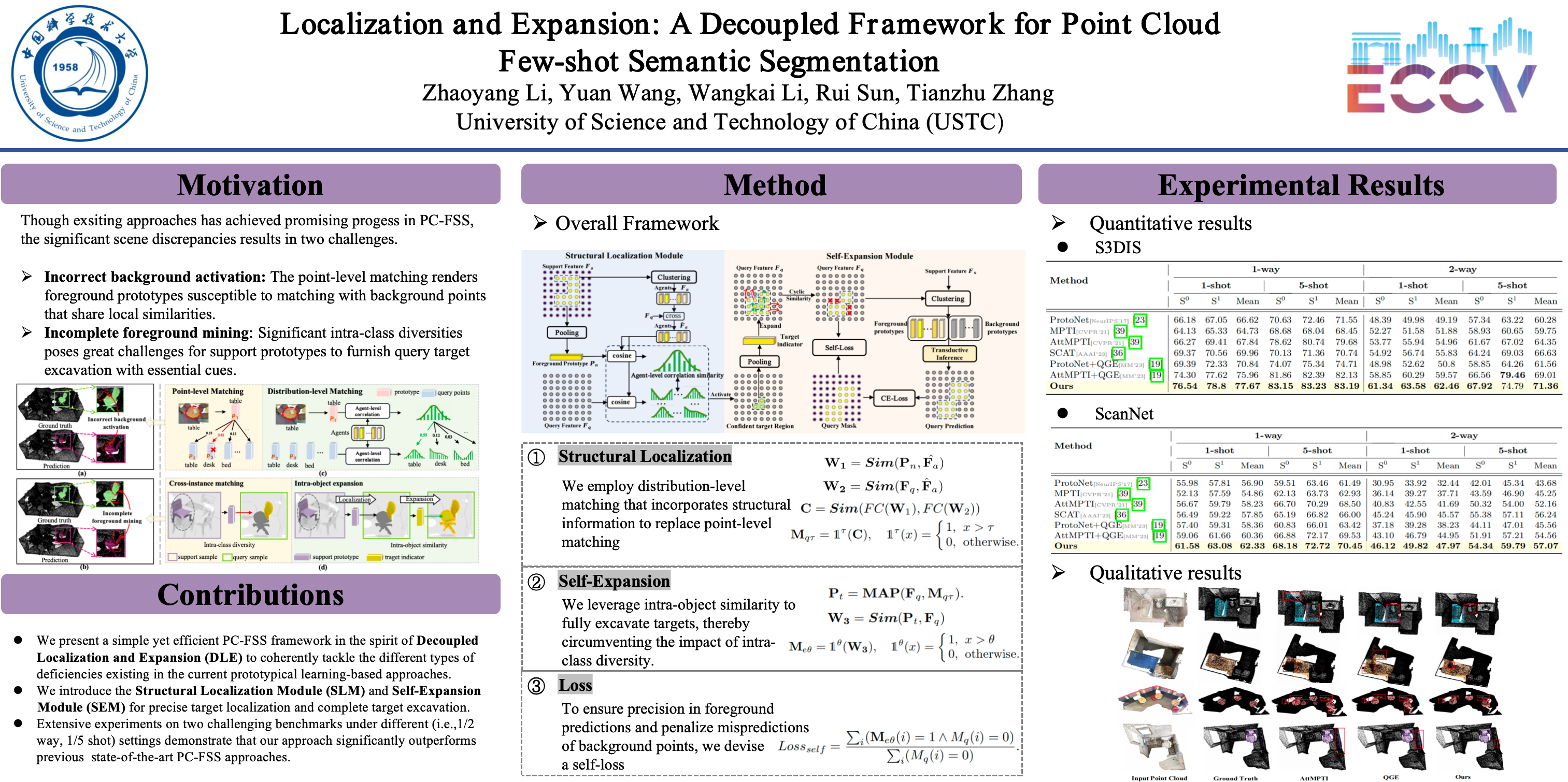
Point cloud few-shot semantic segmentation (PC-FSS) aims to segment targets of novel categories in a given query point cloud with only a few annotated support samples. The current top-performing prototypical learning methods employ prototypes originating from support samples to direct the classification of query points. However, the inherent fragility of point-level matching and the prevalent intra-class diversity pose great challenges to this cross-instance matching paradigm, leading to erroneous background activations or incomplete target excavation. In this work, we propose a simple yet effective framework in the spirit of Decoupled Localization and Expansion (DLE). The proposed DLE, including a structural localization module (SLM) and a self-expansion module (SEM), enjoys several merits. First, structural information is injected into the matching process through the agent-level correlation in SLM, and the confident target region can thus be precisely located. Second, more reliable intra-object similarity is harnessed in SEM to derive the complete target, and the conservative expansion strategy is introduced to reasonably constrain the expansion. Extensive experiments on two challenging benchmarks under different settings demonstrate that DLE outperforms previous state-of-the-art approaches by large margins.