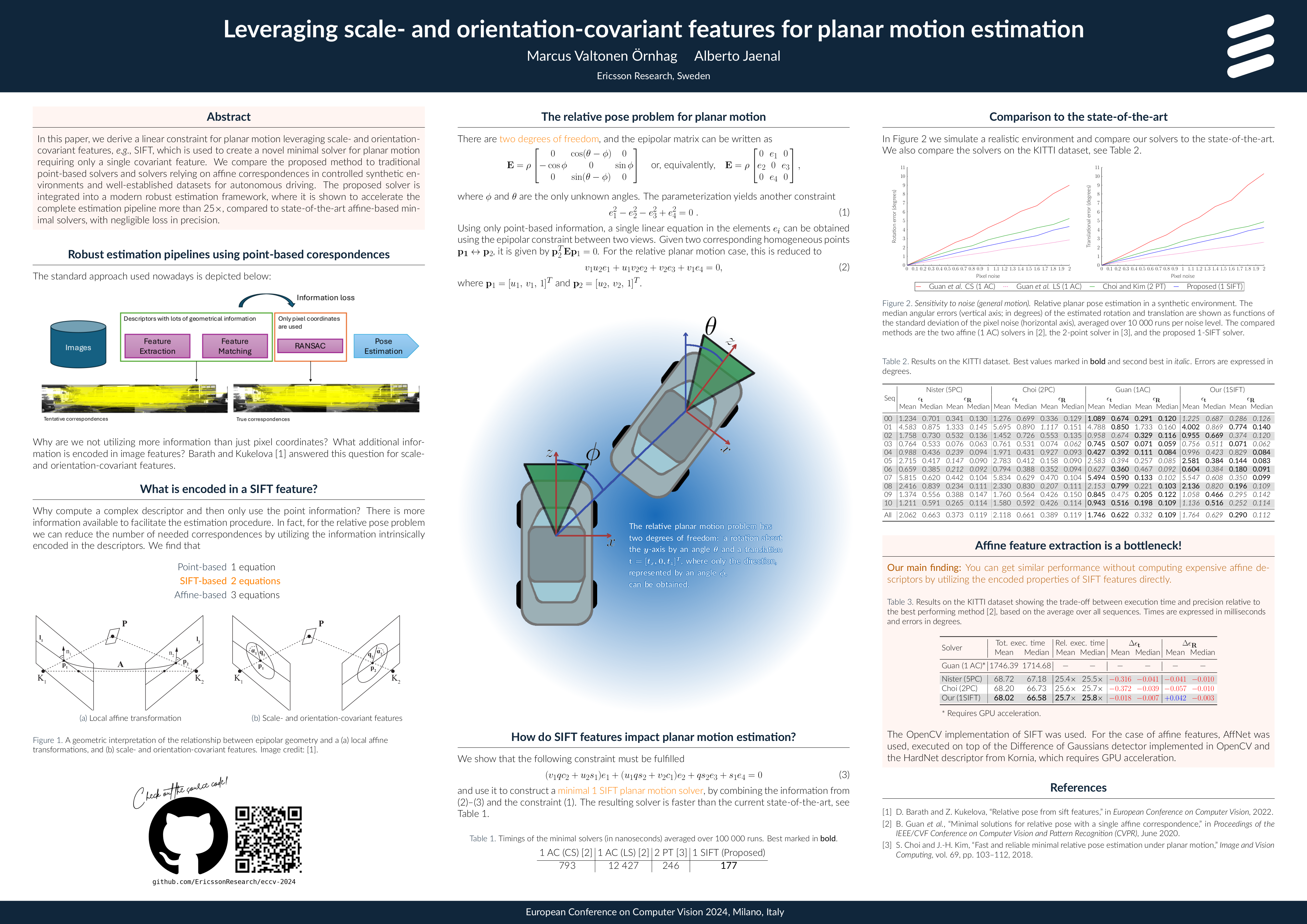
Leveraging scale- and orientation-covariant features for planar motion estimation
Marcus Valtonen Örnhag ⋅ Alberto Jaenal
 Strong Double Blind
Strong Double Blind
2024 Poster
{kind=link}
Abstract
In this paper, we derive a linear constraint for planar motion leveraging scale- and orientation covariant features, e.g., SIFT, which is used to create a novel minimal solver for planar motion requiring only a single covariant feature. We compare the proposed method to traditional point-based solvers and solvers relying on affine correspondences in controlled synthetic environments and well-established datasets for autonomous driving. The proposed solver is integrated in a modern robust estimation framework, where it is shown to accelerate the complete estimation pipeline more than 25x, compared to state-of-the-art affine-based minimal solvers, with negligible loss in precision.
Chat is not available.
Successful Page Load