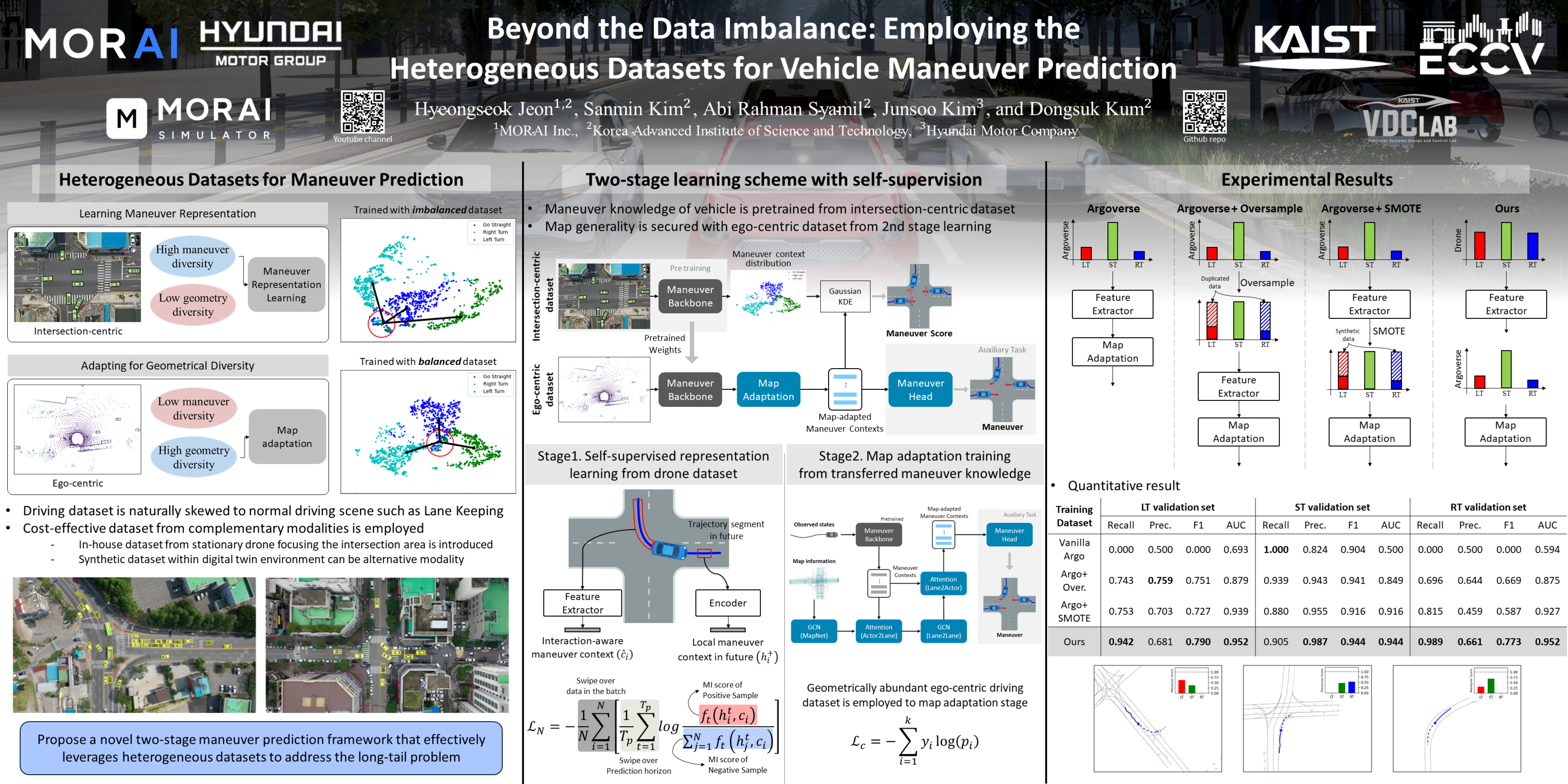
Beyond the Data Imbalance: Employing the Heterogeneous Datasets for Vehicle Maneuver Prediction
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
Predicting the maneuvers of surrounding vehicles is imperative for the safe navigation of autonomous vehicles. However, naturalistic driving datasets tend to be highly imbalanced, with a bias towards the "going straight" maneuver. Consequently, learning and accurately predicting turning maneuvers pose significant challenges. In this study, we propose a novel two-stage maneuver learning method that can overcome such strong biases by leveraging two heterogeneous datasets in a complementary manner. In the first training phase, we utilize an intersection-centric dataset characterized by balanced distribution of maneuver classes to learn the representations of each maneuver. Subsequently, in the second training phase, we incorporate an ego-centric driving dataset to account for various geometrical road shapes, by transferring the knowledge of geometric diversity to the maneuver prediction model. To facilitate this, we constructed an in-house intersection-centric trajectory dataset with a well-balanced maneuver distribution. By harnessing the power of heterogeneous datasets, our framework significantly improves maneuver prediction performance, particularly for minority maneuver classes such as turning maneuvers. The dataset will be made publicly available soon.