ShapeLLM: Universal 3D Object Understanding for Embodied Interaction
Zekun Qi ⋅ Runpei Dong ⋅ Shaochen Zhang ⋅ Haoran Geng ⋅ Chunrui Han ⋅ Zheng Ge ⋅ Li Yi ⋅ Kaisheng Ma
2024 Poster
{kind=link}
Abstract
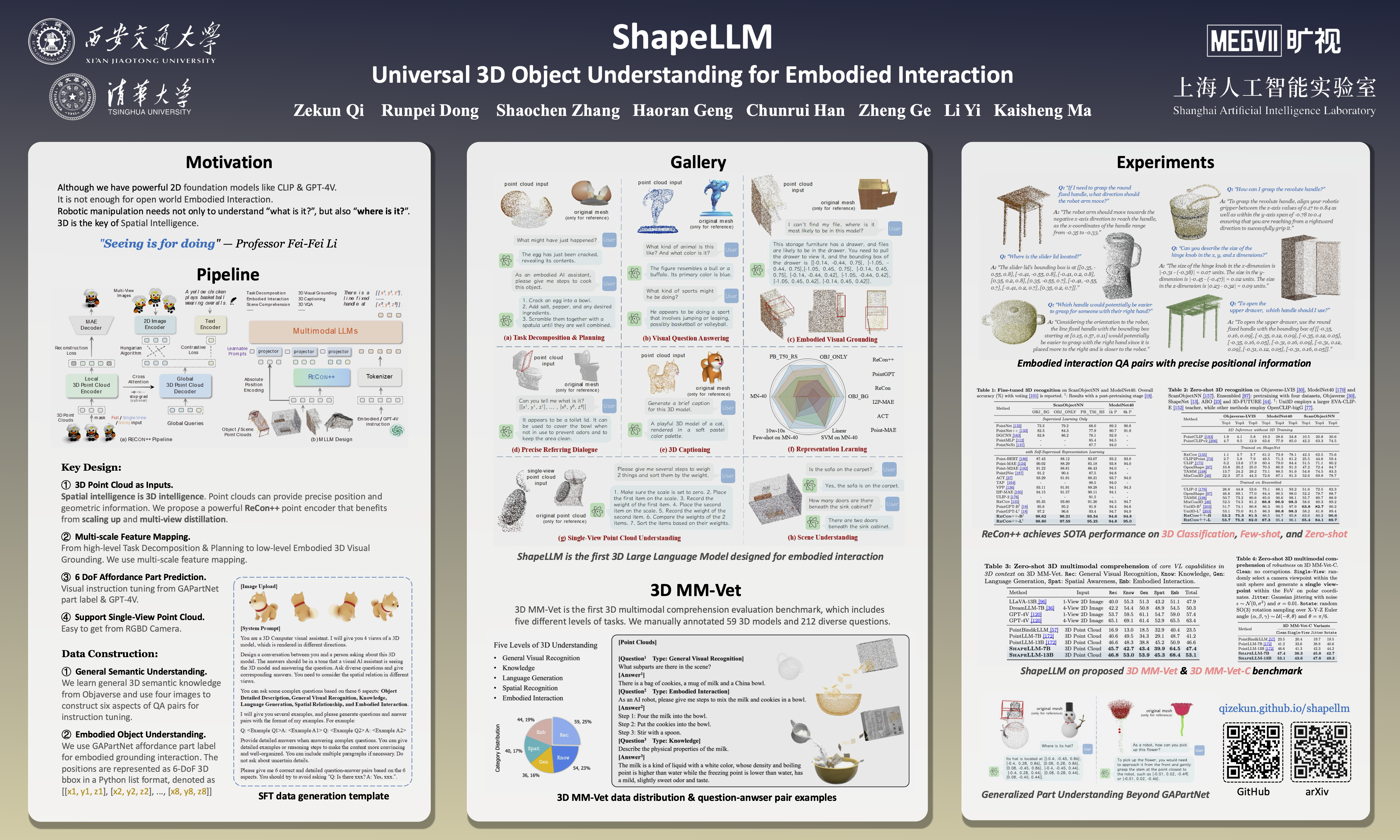
This paper presents ShapeLLM, the first 3D Multimodal Large Language Model (LLM) designed for embodied interaction, exploring a universal 3D object understanding with 3D point clouds and languages. ShapeLLM is built upon an improved 3D encoder by extending ReCon to ReCon++ that benefits from multi-view image distillation for enhanced geometry understanding. By utilizing ReCon++ as the 3D point cloud input encoder for LLMs, ShapeLLM is trained on constructed instruction-following data and tested on our newly human-curated benchmark, 3D MM-Vet. ReCon++ and ShapeLLM achieve state-of-the-art performance in 3D geometry understanding and language–unified 3D interaction tasks, such as embodied visual grounding.
Chat is not available.
Successful Page Load