Flowed Time of Flight Radiance Fields
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
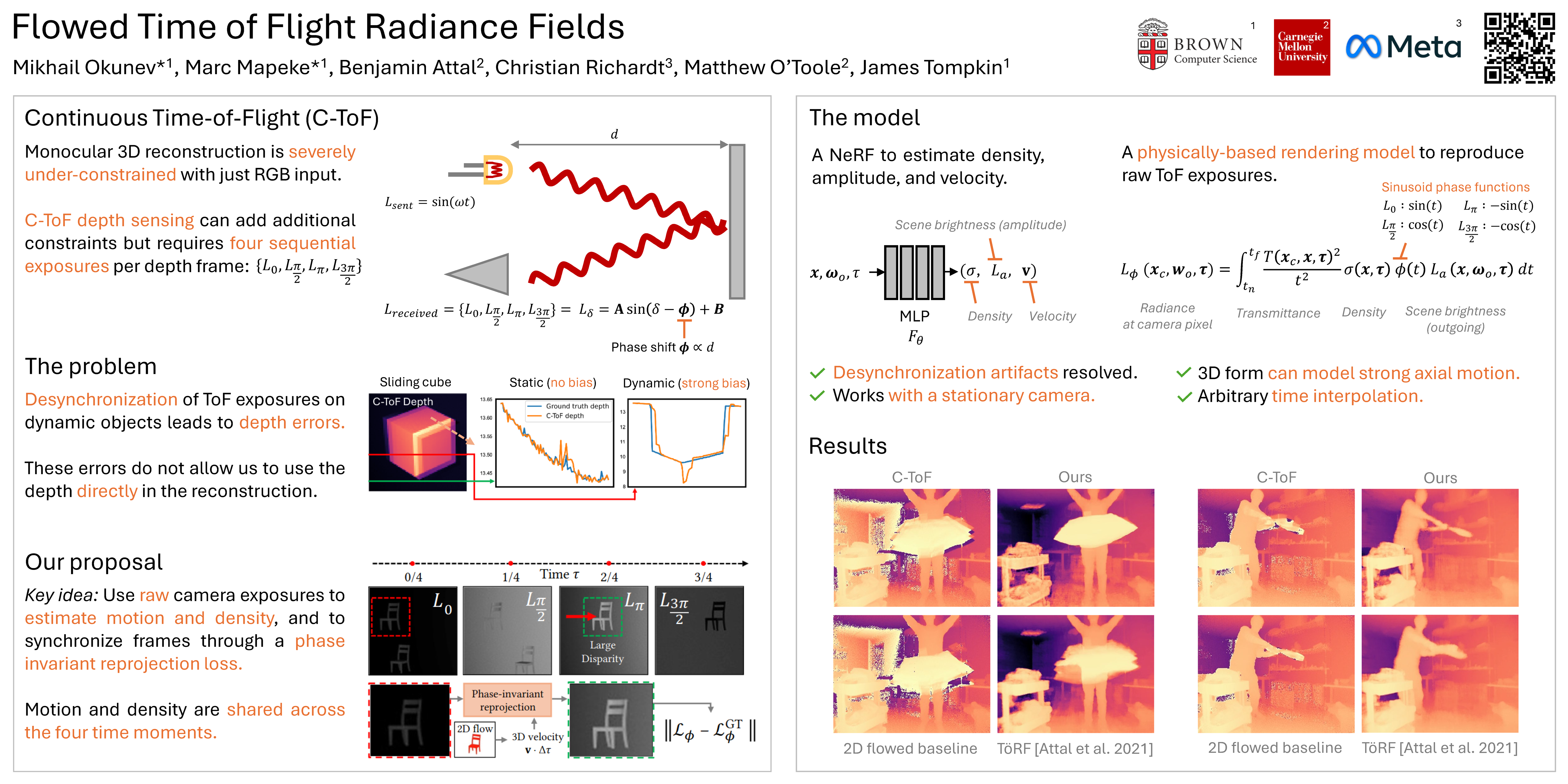
We present a method to correct for motion artifacts in continuous-wave time of flight (C-ToF) imaging. As C-ToF cameras must capture multiple exposures to derive depth, any moving object will exhibit depth errors. We formulate an optimization problem to reconstruct the raw frames captured by the camera via an underlying 4D volumetric scene and a physically-based differentiable C-ToF simulator. With weak optical flow supervision, we can infer a moving 3D scene that explains the raw captures, even though any particular time instant does not provide sufficient constraints upon the depth or motion. On synthetic sequences, we find that our approach reduces depth errors on dynamic objects by up to 20×, particularly for large disparities (≥ 25 pixels) between raw frames. On real-world sequences, we see qualitatively similar gains with artifacts resolved on falling pillows and swinging baseball bats.