Pre-trained Visual Dynamics Representations for Efficient Policy Learning
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
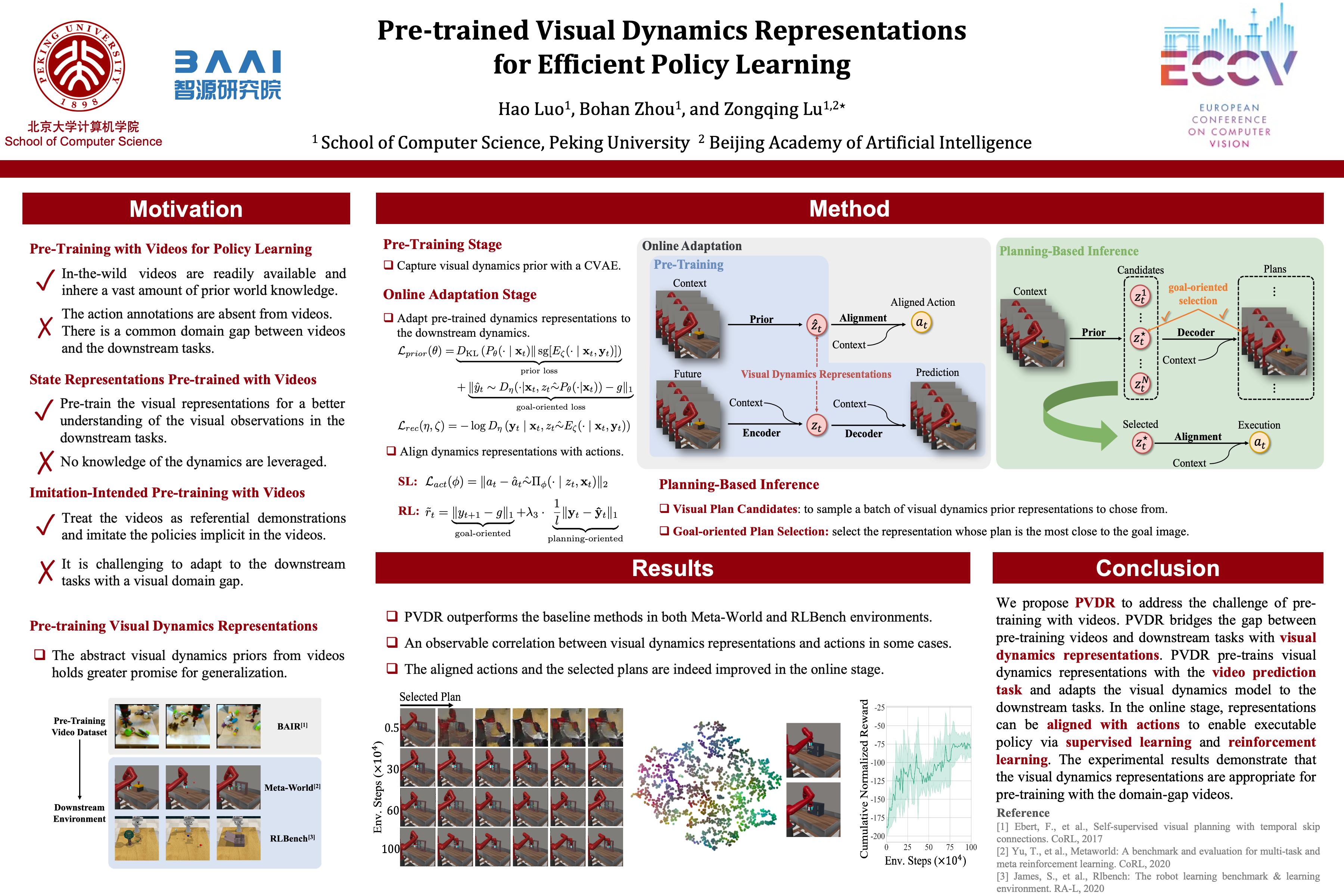
Pre-training for Reinforcement Learning (RL) with purely video data is a valuable yet challenging problem. Although in-the-wild videos are readily available and inhere a vast amount of prior world knowledge, the absence of action annotations and the common domain gap with downstream tasks hinder utilizing videos for RL pre-training. To address the challenge of pre-training with videos, we propose Pre-trained Visual Dynamics Representations (PVDR) to bridge the domain gap between videos and downstream tasks for efficient policy learning. By adopting video prediction as a pre-training task, we use a Transformer-based Conditional Variational Autoencoder (CVAE) to learn visual dynamics representations. The pre-trained visual dynamics representations capture the visual dynamics prior knowledge in the videos. This abstract prior knowledge can be readily adapted to downstream tasks and aligned with executable actions through online adaptation. We conduct experiments on a series of robotics visual control tasks and verify that PVDR is an effective form for pre-training with videos to promote policy learning.