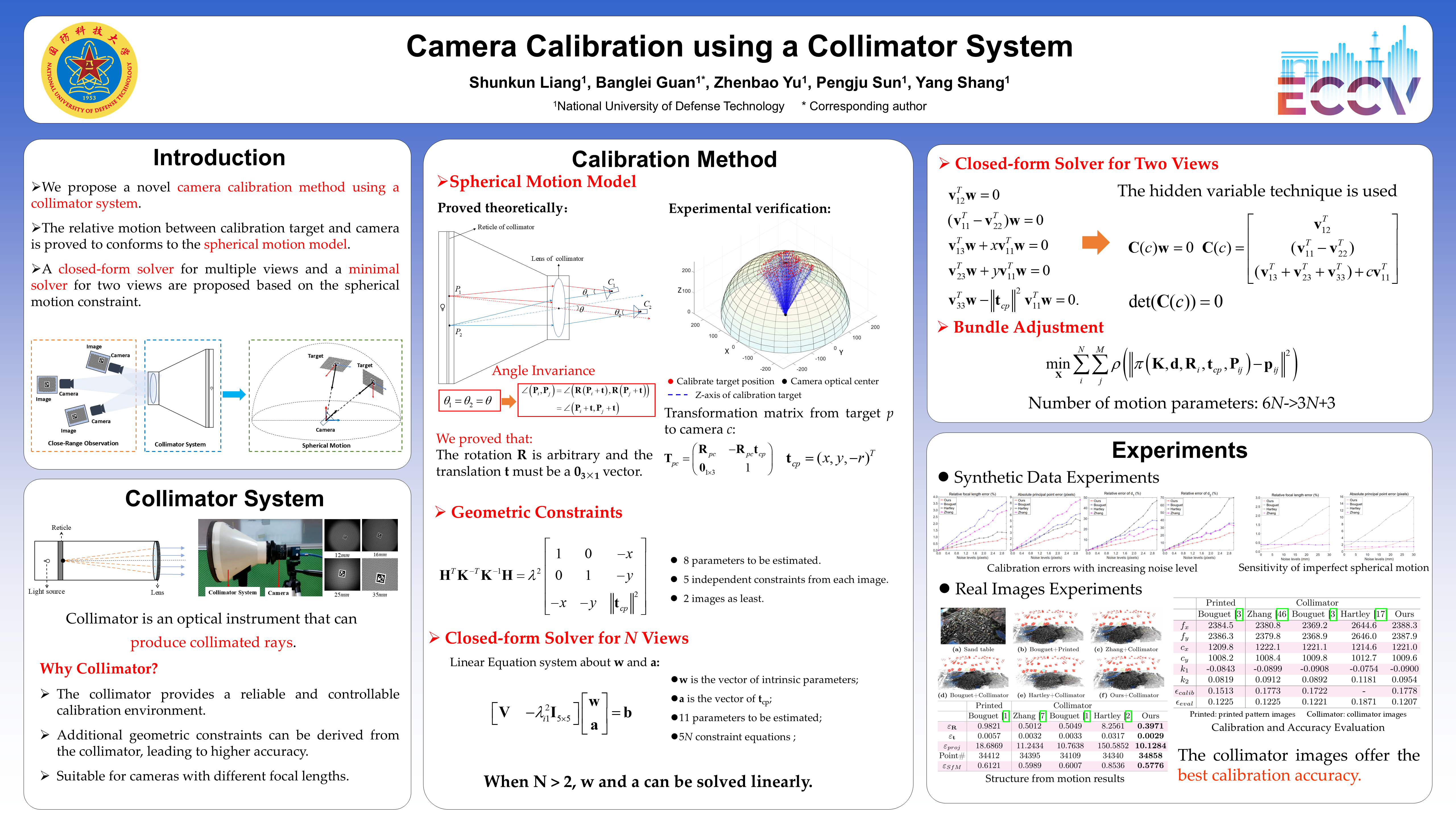
Camera Calibration using a Collimator System
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
Camera calibration is a crucial step in photogrammetry and 3D vision applications. In practical application scenarios where the camera has a long working distance to cover a wide area, target-based calibration methods become complicated and inflexible due to site limitations. This paper introduces a novel camera calibration method using a designed collimator system. This allows the camera to clearly observe the calibration pattern at a close range. Based on the optical geometry of collimator system, we prove that the motion of the calibration target conforms to the spherical motion model with respect to the camera. The spherical motion constraint reduces the original 6DOF motion to 3DOF pure rotation. Moreover, a closed-form solver for multiple views and a minimal solver for two views are proposed for camera calibration. The performance of the proposed method is tested in both synthetic and real-world experiments, which demonstrates that the calibration accuracy is superior to the state-of-the-art methods.