Continuous SO(3) Equivariant Convolution for 3D Point Cloud Analysis
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
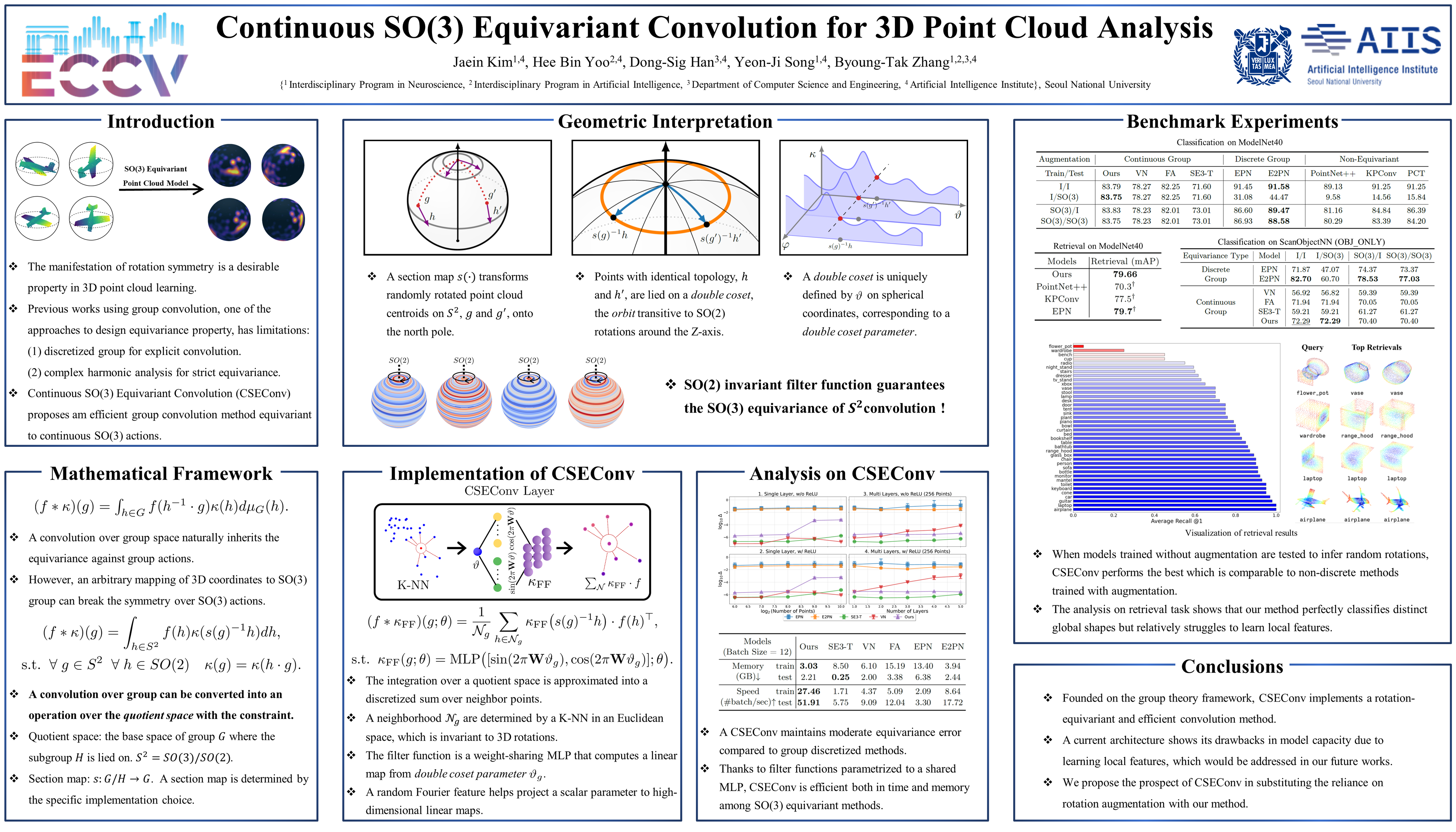
The inherent richness of geometric information in point cloud underscores the necessity of leveraging group equivariance, as preserving the topological structure of the point cloud up to the feature space provides an intuitive inductive bias for solving problems in 3D space. Since manifesting the symmetry by means of model architecture has an advantage over the dependence on the augmentation, it has been a crucial research topic in the point cloud field. However, existing methods have limitations in the non-continuity of groups or the complex architecture causing computational inefficiency. In this paper, we propose CSEConv: a novel point convolution layer equivariant under continuous SO(3) actions. Its structure is founded on the framework of group theory, realizing the convolution module defined on a sphere. Implementing its filters to be explicit, continuous, and rigorously equivariant functions defined upon the double coset space is the distinctive factor which makes our method more scalable than previous approaches. From the classification experiments on synthetic and real-world point cloud datasets, our method achieves the best accuracy, to the best of our knowledge, amidst point-based models equivariant against continuous rotation group.