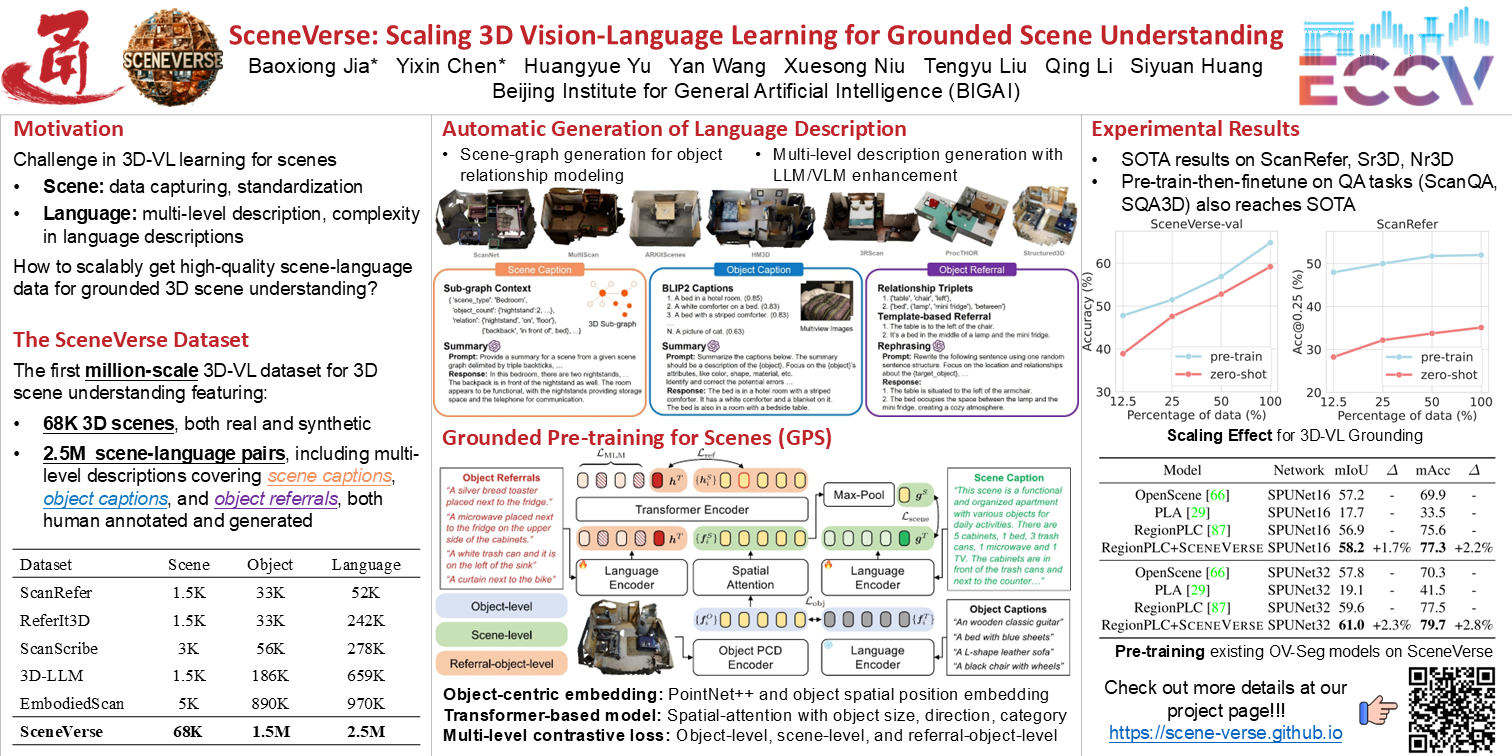
SceneVerse: Scaling 3D Vision-Language Learning for Grounded Scene Understanding
{kind=link}
Abstract
3D vision-language grounding, which aims to align language with 3D physical environments, stands as a cornerstone in developing embodied agents. In comparison to recent advancements in the 2D domain, grounding language in 3D scenes faces two significant challenges: (i) the scarcity of paired 3D vision-language data to support grounded learning of 3D scenes, especially considering complexities within diverse object configurations, rich attributes, and intricate relationships; and (ii) the absence of a unified learning framework to distill knowledge from grounded 3D data. In this work, we aim to address these major challenges in 3D vision-language by examining the potential of systematically upscaling 3D vision-language learning in indoor environments. We introduce the first million-scale 3D vision-language dataset, SceneVerse, encompassing about 68K 3D indoor scenes and comprising 2.5M vision-language pairs derived from both human annotations and our scalable scene-graph-based generation approach. We demonstrate that this scaling allows for a unified pre-training framework, Grounded Pre-training for Scenes (GPS), for 3D vision-language learning. Through extensive experiments, we showcase the effectiveness of GPS by achieving state-of-the-art performance on existing 3D visual grounding and question-answering benchmarks. We also show that the data scale-up effect is not limited to GPS, but is generally beneficial for 3D models on 3D vision-language (3D-VL) tasks like semantic segmentation. The vast potential of SceneVerse and GPS is unveiled through zero-shot transfer experiments in the challenging 3D vision-language tasks.