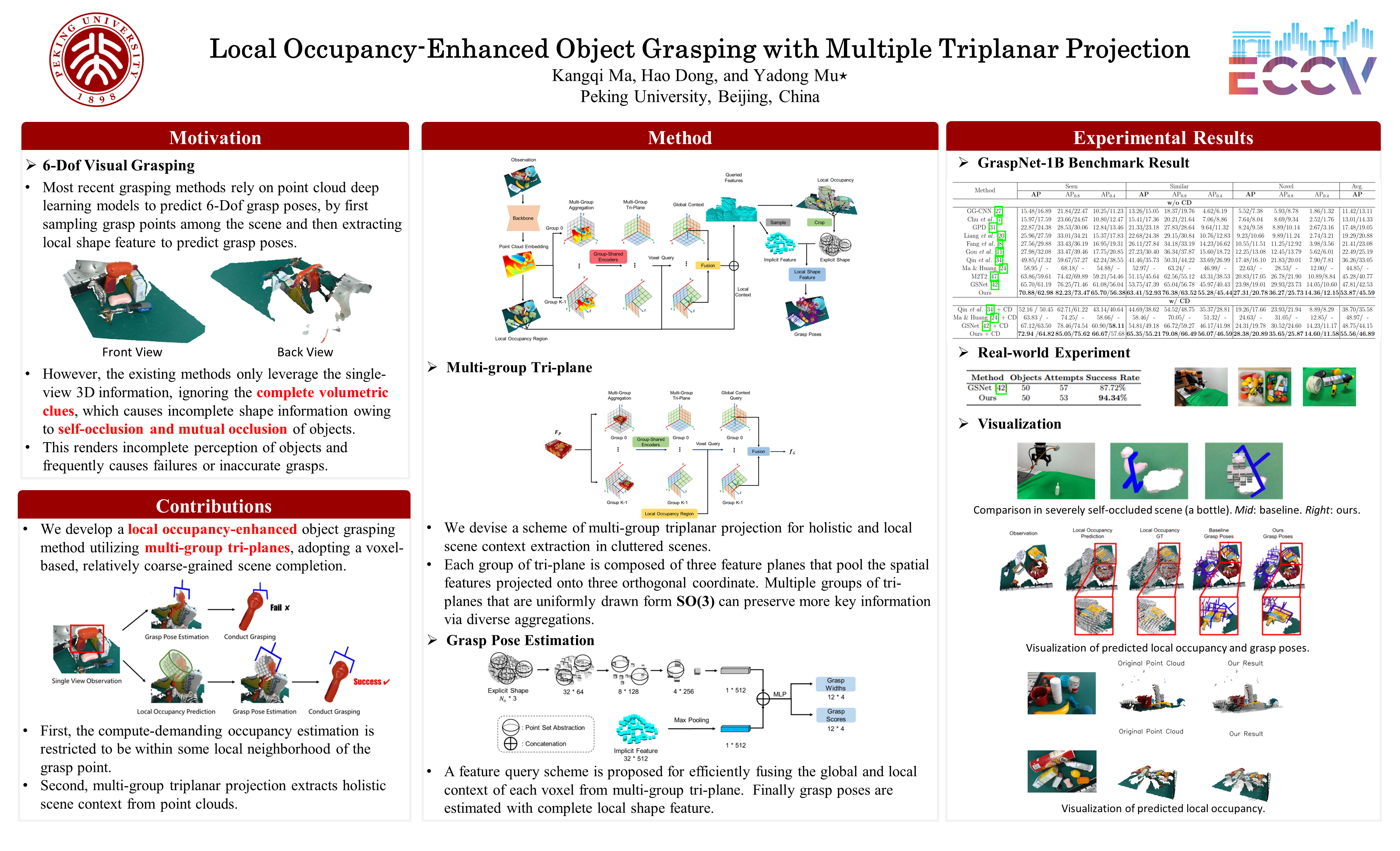
Local Occupancy-Enhanced Object Grasping with Multiple Triplanar Projection
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
This paper addresses the challenge of robotic grasping of general objects. Similar to prior research, the task reads a single-view 3D observation (i.e., point clouds) captured by a depth camera as input. Crucially, the success of object grasping highly demands a comprehensive understanding of the shape of objects within the scene. However, single-view observations often suffer from occlusions (including both self and inter-object occlusions), which lead to gaps in the point clouds, especially in complex cluttered scenes. This renders incomplete perception of the object shape and frequently causes failures or inaccurate pose estimation during object grasping. In this paper, we tackle this issue with an effective albeit simple solution, namely completing grasping-related scene regions through local occupancy prediction. Following prior practice, the proposed model first runs by proposing a number of most likely grasp points in the scene. Around each grasp point, a module is designed to infer any voxel in its neighborhood to be either void or occupied by some object. Importantly, the occupancy map is inferred by fusing both local and global cues. We implement a multi-group tri-plane scheme for efficiently aggregating long-distance contextual information. The model further estimates 6-DoF grasp poses utilizing the local occupancy-enhanced object shape information and returns the top-ranked grasp proposal. Comprehensive experiments on both the large-scale GraspNet-1Billion benchmark and real robotic arm demonstrate that the proposed method can effectively complete the unobserved parts in cluttered and occluded scenes. Benefiting from the occupancy-enhanced feature, our model clearly outstrips other competing methods under various performance metrics such as grasping average precision.