Caltech Aerial RGB-Thermal Dataset in the Wild
{kind=link}
Abstract
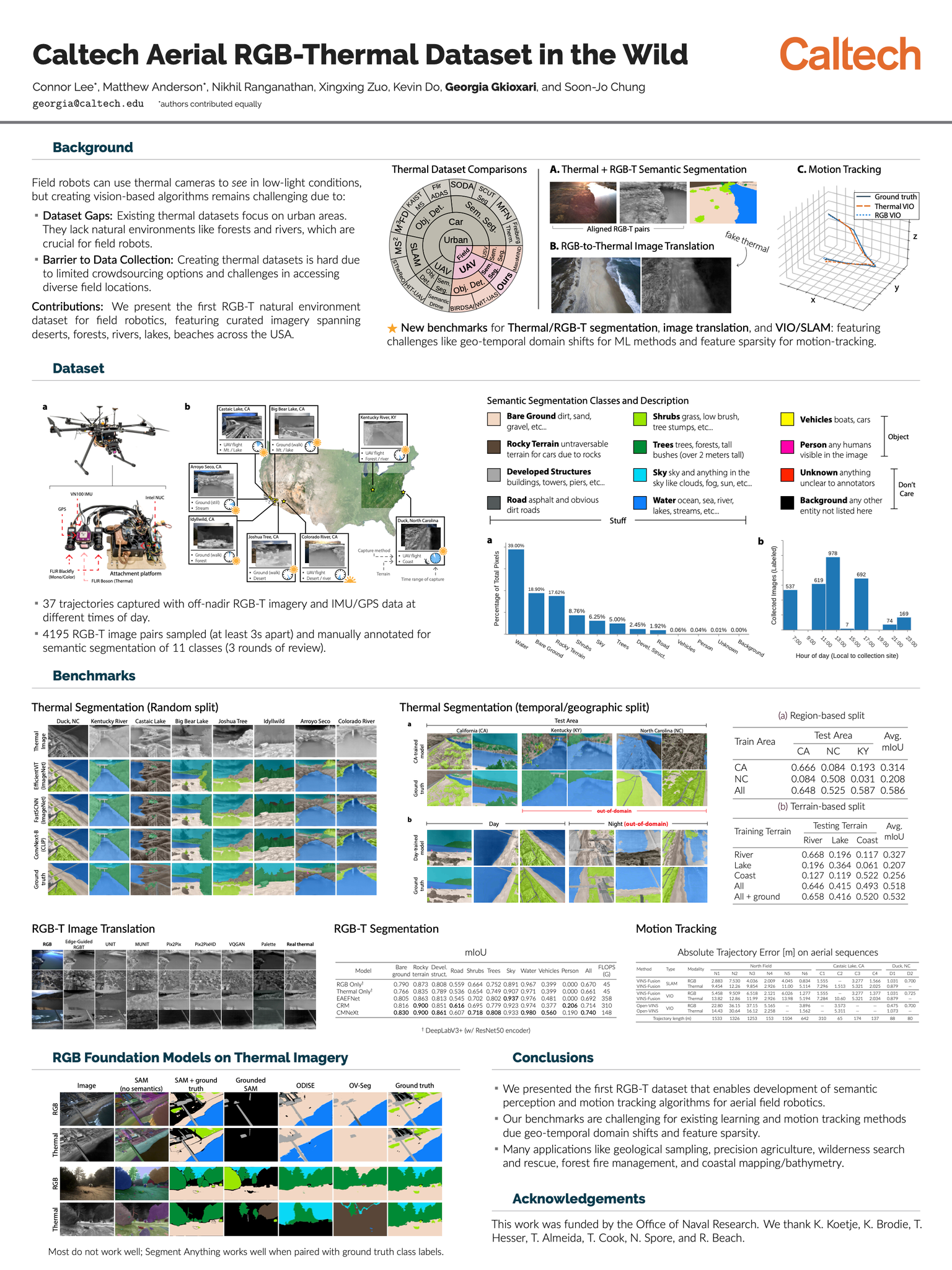
We present the first publicly available RGB-thermal dataset designed for aerial robotics operating in natural environments. Our dataset captures a variety of terrains across the continental United States, including rivers, lakes, coastlines, deserts, and forests, and consists of synchronized RGB, long-wave thermal, global positioning, and inertial data. Furthermore, we provide semantic segmentation annotations for 10 classes commonly encountered in natural settings in order to facilitate the development of perception algorithms robust to adverse weather and nighttime conditions. Using this dataset, we propose new and challenging benchmarks for thermal and RGB-thermal semantic segmentation, RGB-to-thermal image translation, and visual-inertial odometry. We present extensive results using state-of-the-art methods and highlight the challenges posed by temporal and geographical domain shifts in our data.