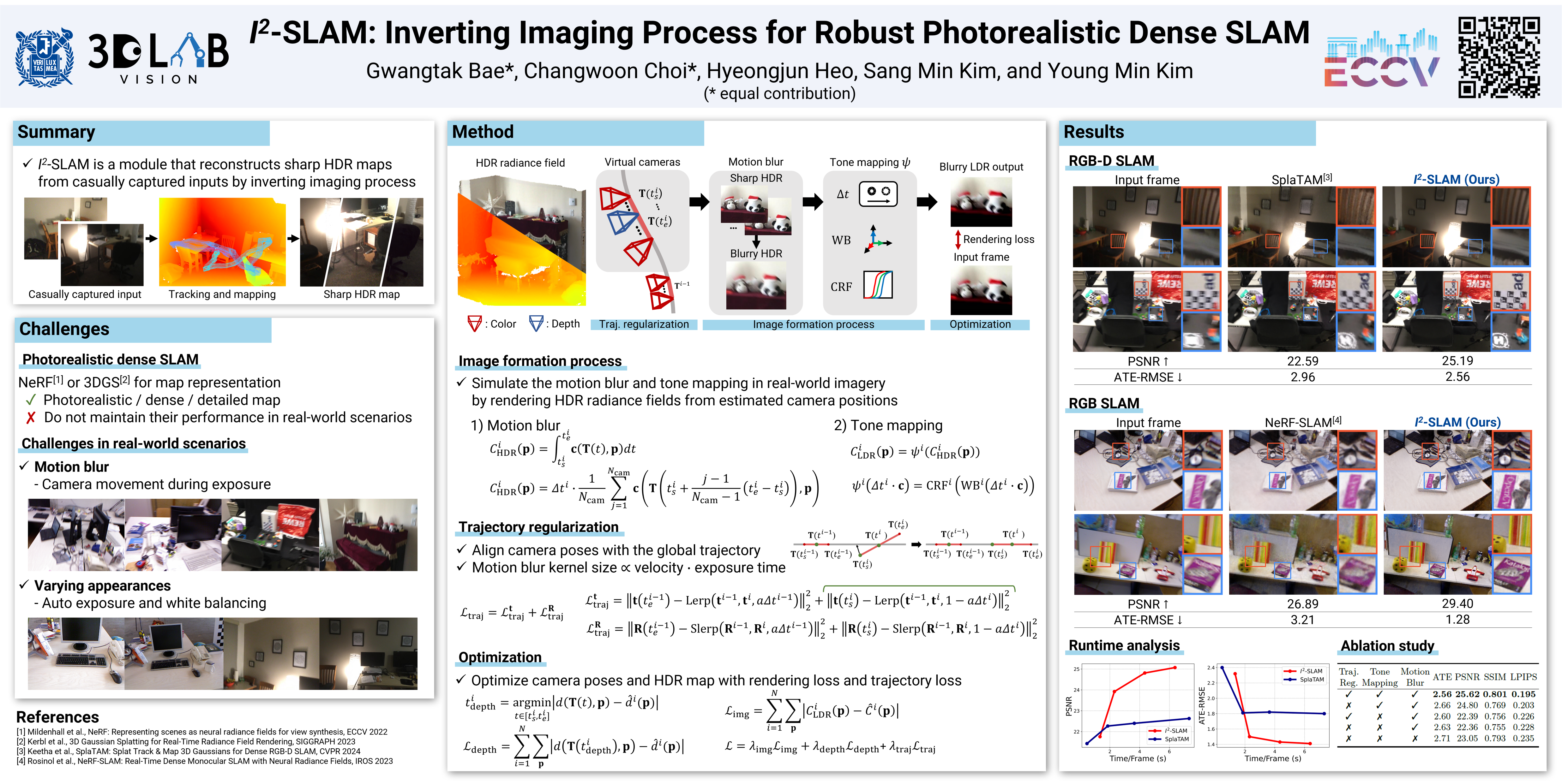
I2-SLAM: Inverting Imaging Process for Robust Photorealistic Dense SLAM
 Strong Double Blind
Strong Double Blind
{kind=link}
Abstract
We present an inverse image-formation module that can enhance the robustness of existing visual SLAM pipelines for in-the-wild scenarios. Casual video captures often suffer from motion blur and varying appearances, which degrades the final quality of coherent 3D visual representation. We propose integrating the physical imaging into the SLAM system, which employs linear HDR radiance maps to collect measurements. Specifically, individual frames aggregate images of multiple poses along the camera trajectory to explain prevalent motion blur in hand-held videos. Additionally, we accommodate per-frame appearance variation by dedicating explicit variables for image formation steps, namely white balance, exposure time, and camera response function. Through joint optimization of additional variables, the SLAM pipeline produces high-quality images with more accurate trajectories. Extensive experiments demonstrate that our approach can be incorporated into recent visual SLAM pipelines using various scene representations, such as neural radiance fields or Gaussian splatting.